SOON: Scenario Oriented Object Navigation
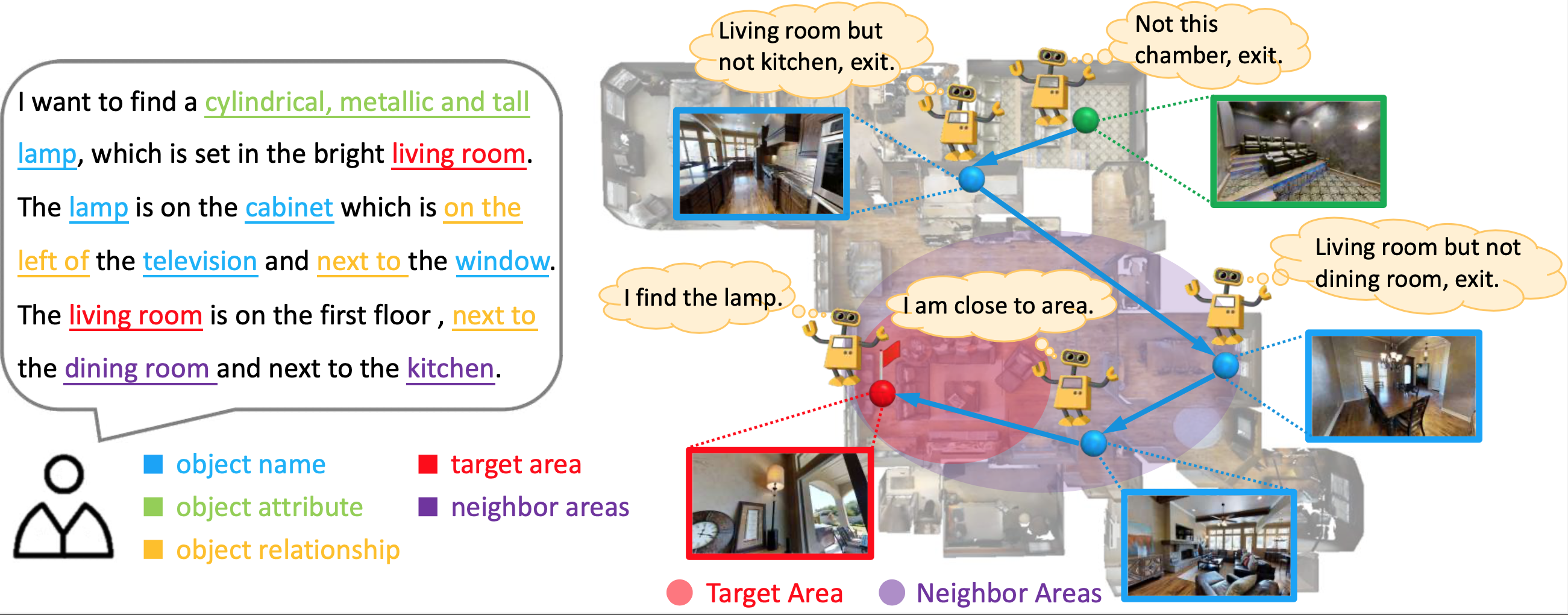
The ability to navigate like a human towards a language-guided target from anywhere in a 3D embodied environment is one of the “holy grail” goals of intelligent robots. Most visual navigation benchmarks, however, focus on navigating toward a target from a fixed starting point, guided by an elaborate set of instructions that depicts step-by-step. This approach deviates from real-world problems in which human-only describes what the object and its surrounding look like and asks the robot to start navigation from anywhere. Accordingly, we introduce a Scenario Oriented Object Navigation (SOON) task. In this task, an agent is required to navigate from an arbitrary position in a 3D embodied environment to localize a target following a scene description. We also propose a new large-scale benchmark named From Anywhere to Object (FAO) dataset. To avoid target ambiguity, the descriptions in FAO provide rich semantic scene information includes: object attribute, object relationship, region description, and nearby region description.
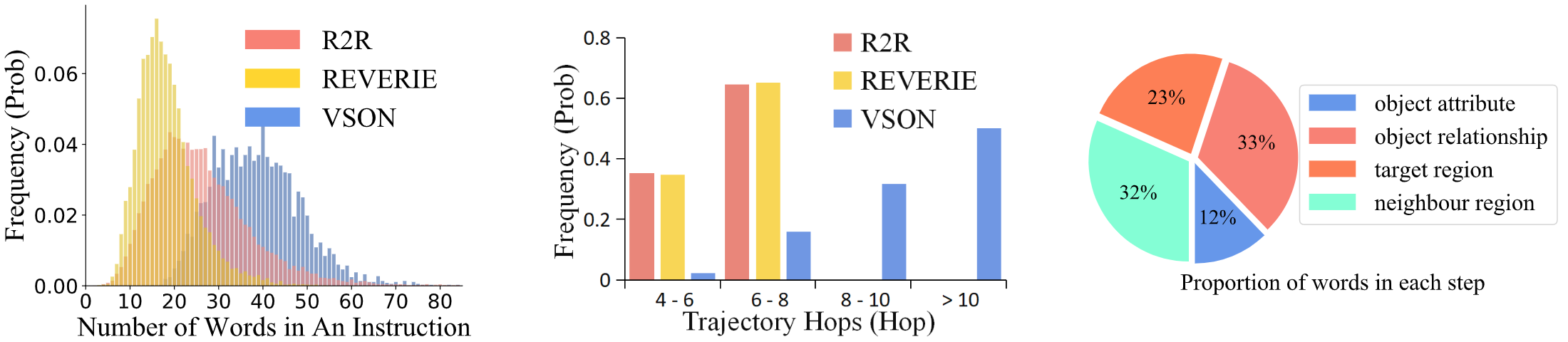
Dataset Analysis
Download FAO dataset
The FAO dataset is provided: train.json, val_unseen_instrs.json,val_unseen_house.json, test.json
Our technique report for this challenge is provided: technique_report.pdf
Important Dates
July 28, 2021: Challenge starts
September 23, 2021: Results submission deadline (Extend to September 30, due to the update of testing dataset)
October 8, 2021: Paper submission deadline
Citation
@InProceedings{Zhu_2021_CVPR,
author = {Zhu, Fengda and Liang, Xiwen and Zhu, Yi and Yu, Qizhi and Chang, Xiaojun and Liang, Xiaodan},
title = {SOON: Scenario Oriented Object Navigation With Graph-Based Exploration},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2021},
pages = {12689-12699}
}